Definitionen:
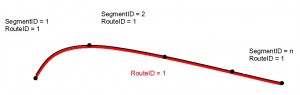
Referenzlinien (routes, chains) sind eine Aneinanderreihung gerichteter Polylines mit einer gemeinsamen ID gebildet aus den Mittellinien (Centerlines) von Verkehrsflächen (Straßen, Wege, Treppen, Aufzüge, Schienen, Wasserwege, Fluglinien, Leitungen); die Auswahl von Referenzlinien kann fest oder auch variabel sein
Referenzpunkte bilden die Anfangs- und Endpunkte einer Referenzlinie.
Objekte können mit ihrer Position im Raum außer durch Koordinaten (Georeferenzierung) durch die Längenentfernung auf der Referenzlinie sowie dem kürzesten seitlichen Abstand von der Referenzlinie (Lineare Referenzierung) gemessen werden.
Ereignisse entstehen durch die orts-, zeit- und attributive Veränderung von Objekten
Situationen sind räumlich, zeitlich und thematisch zusammenhängende Ereignisse
Referenzräume sind situativ definierte Informationssysteme zwischen zwei oder mehr mit einander nachrichtlich durch Sender und Empfänger verbundenen Referenzpunkten
Das situative Verhalten von Objekten innerhalb von Referenzräumen wird grundsätzlich stochastisch und nur als Sonderfall deterministisch betrachtet. Die Objekte und Ereignisse selbst werden nicht individuell, sondern nur durch die Zugehörigkeit zu situativ definierten Klassen (Fußgänger, Radfahrer, Fahrzeugtyp, Paket, Brief, etc.) und durch Wahrscheinlichkeiten ihres Auftretens an einem genau definierten Ort und zu einem exakten Zeitpunkt ermittelt, so daß zur Beschreibung ihres Verhaltens lediglich eine zur Klassifizierung und Registrierung nach Mustern (Mustererkennung) genügt.
Unter der Annahme, die Wahrscheinlichkeit des Auftretens eines Objektes oder Ereignisses innerhalb eines Referenzraumes ist unabhängig von dem Auftreten des vorhergehenden Objektes bzw. Ereignisses, also zufällig, dann handelt es sich bei dem betrachteten System um eine Markow-Kette, bei der die Wahrscheinlichkeiten des Auftretens der klassifizierten Objekte und Ereignisse immer gleich bleiben. Es bedarf folglich keiner individuellen Verfolgung eines Objektes innerhalb des Systems, um sein Verhalten zu beschreiben. Ändert sich jedoch die Situation selbst, z.B. die Menge oder Dichte des in und aus dem Referenzraumes strömenden Verkehrs, dann ändern sich lediglich die meßbaren Größenparameter, die den Zustand des Gesamtsystems beschreiben. Um das Verhalten von Objekten und Ereignissen zu steuern genügt es folglich, lediglich diese Parameterwerte zu übermitteln. Der Empfänger dieser Informationen kann dann in Kenntnis der Situation (z.B. Straßenkreuzung) und der spezifischen Parameterwerte (z.B. Verkehrsdichte) entweder autonom über sein weiteres Verhalten entscheiden, wenn er dazu über die Fähigkeiten (Wissen, Erfahrung, Applikation) verfügt), oder sich auch von außen steuern lassen.
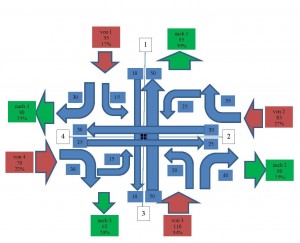
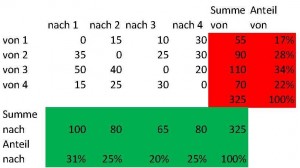
Ähnlich wie in diesem Beispiel einer vierarmingen Kreuzung können an beliebigen Kreuzungen, so auch an Autobahnein- und -ausfahrten, lediglich die Summen der Verkehrsmengen und die Anteile pro Ast nach Zu- und Abfluß in Ansatz gebracht werden, um die Verkehrssituation hinreichend zu beschreiben. Für den Verkehrsfluß im Zeitablauf dienen dann Zeitreihen der Gesamtverkehrsmengen pro Knoten.
Die Beschreibung von Objekten und Ereignissen auf der Strecke zwischen den Referenzknoten kann ebenso nach rein stochastischen Methoden erfolgen. Falls keine Zu- Abflüsse an Parkplätzen und Garageneinfahrten sowie Nebenwegen oder Querschnittsveränderungen durch Unfälle oder Baustellen dazwischenliegen, müssen die Verkehrsmengen am Anfang und Ende der Strecke gleich sein. Anders als bei den herkömmlichen kausal determinierten Verkehrsmodellen, wie etwa das Gravitationsmodell oder die Mikrosimulation, deren Anpassung an die Realität durch Kalibrierung mittels Verkehrszählungen erst geschaffen werden muß, setzt unser Ansatz zunächst auf eine stochastisch rein phänomenologische Erfassung der Verkehrssituation vor Ort und dann nachrangig nach Kausalitäten, ähnlich eines Regressionsansatzes, bei dem es eine erklärten Anteil und unerklärten Rest gibt, der der der Gesetzmäßigkeit der Entropie folgt. Das Verfahren ist einfach, stabil und preiswert in der Ausführung.
Das Ergebnis der Auswertung dieser Wahrscheinlichkeitsdaten ist umgekehrt nur als Musterdarstellung mit der situativ definierten Genauigkeit recodierbar. Durch die Flexibilität der Situationsdefinition ist es trotz grundsätzlicher Einschränkungen der Informationsübermittlung in und aus dem stochastischen Referenzsystem dennoch möglich, dezidierte auch Situationsbeschreibungen hinsichtlich der Lage, der Zeit und der Ausprägung individueller Objekte und Ereignisse an den Referenzpunkten in das System einzuspeisen.
Dies ist vor allem beim Betreten eines neuen Referenzraumes von Bedeutung. Wenn zum Beispiel eine Person oder Ware einen Referenzraum, etwa eine öffentliche Straße, verlassend innerhalb des neuen, angrenzenden Referenzraumes, etwa einem Warenlager, zu einem spezifischen Standort, einem Regal, gelangen soll, erhält sie am, als Referenzpunkt im Netz ausgewiesenen Eingang neue, situationsspezifische Informationen (z.B. Karte, optische, akustische oder elektromagnetische Signale) übermittelt, die das neue Referenznetz beschreiben und eine Entscheidung hinsichtlich des weiteren Verhaltens (z.B. Standortfindung oder Umrüstung) ermöglichen. Möglich ist auch eine Informationsübermittlung innerhalb des Referenzraumes, z.B. von Straßenkreuzung zu Straßenkreuzung, entweder durch Signale ausgehend von festen Objekten an den Referenzpunkten am Eingang und Ausgang in Gleichzeitigkeit oder durch sich zwischen den Referenzpunkten bewegenden mobilen Objekten, z.B. Fahrzeugen, mit einer entsprechenden zeitlichen Verzögerung. Da sich der Verkehrsfluß im Gleichgewicht befindet, führt die zeitliche Verzögerung in kontinuierlicher Betrachtung zu keinem Informationsverlust.
Durch den Bezug zum jeweils gültigen linearreferenzierten intermodalen Verkehrsnetz und die stets aktuelle Informationsübermittlung an den Referenzpunkten ergeben sich folgende Vorteile gegenüber den bisher verwendeten Informationssystemen:
- Erhöhte Genauigkeit der Positionsbestimmung und situativ bestimmte Verknüpfung von Objekten und Ereignissen auch ohne GPS innerhalb und außerhalb von Verkehrsflächen aller Art (auf Straßen, Schienen- und Wasserwege, in Kanälen und Kabelschächten, auf Freiflächen, innerhalb von Gebäuden, Stadien, etc. ),
- Optimierung und Reduzierung der Informationsübermittlung auf die für die jeweilige Verkehrssituation erforderlichen Datenflüsse
- Gewährleistung der Systemneutralität gegenüber anderen Informationssystemen, indem lediglich ein Bezug zu dem vorgegebenen, auch mit einfachen Methoden erstellbaren und nachmeßbaren Referenznetz hergestellt wird, die übrigen Bezüge, wie die Situationsdefinition, aber frei wählbar bleiben; ebenso ist das System unabhängig von Meßtechniken, seien sie mechanischer, optischer, akustischer oder elektromagnetischer Art.
- Optimaler Datenschutz durch Unabhängigkeit von GPS und Internet sowie der Notwendigkeit zentraler Informationsverarbeitung
- Entwicklung eines zukunftweisenden lernenden System der Entscheidungsfindung, bei dem nicht allein die Künstliche Intelligenz, sondern auch politische, ökonomische und soziale Kompetenz zum Einsatz kommt.
Geeignete technische Instrumente der Informationsgewinnung, -übertragung und -darstellung auf Basis eines intermodalen linear- und georeferenzierten Verkehrsnetzes können sein:
- Detektoren zur Distanz-, Bewegungs- und Geschwindigkeitsermittlung (Infrarot, Ultraschall)
- Verfahren zur Mustererkennung (Pattern Recognition) und Musterdarstellung (Virtual Reality)
- Signale zur drahtlosen Informationsübertragung (Rundfunk, Mobilfunk, Wireless LAN, UWB, Bluetooth, RFID)
Geeignete Verfahren zur Positionsbestimmung:
- Angabe der Zelle (Cell of Origin)
- Laufzeitmessung (Time of Arrival (ToA))
- Laufzeitdifferenzmessung (Time Difference of Arrival (TDoA))
- Messung des Einfallswinkels (Angle of Arrival)
- Signalstärkemessung (Received Signal Strength (RSS) bzw. die Received Signal Strength Indication (RSSI))
- Visuelle Positionsbestimmung mit digitalen Bildern auf Basis photogrammetrischer Methoden
- Trägheitsnavigation (Inertial Navigation)
- aber auch einfache Schrittzählung, Maßband und Meßrad
Zur Situationsbestimmung von Objekten oder Ereignissen mittels Linearer Referenzierung innerhalb räumlicher Verkehrsflächen (Straßen, Wege, Bahnkörper, Gewässer, aber auch innerhalb von Gebäuden) können folgende Meß- und Rechenmethoden angewendet werden:
- Berechnung der linearreferenzierten Position eines festen georeferenzierten Objektes in Bezug zu beiden Referenzpunkten am Anfang und Ende einer zugeordneten Referenzlinie. Dazu bekommt das Objekt die „routeid“ der Referenzlinie.

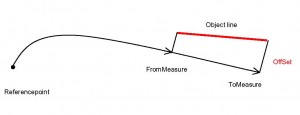
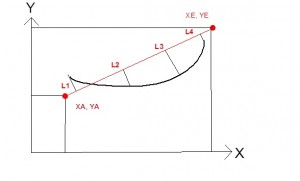
Die Längenwerte sind Skalare, so daß eine Geometrietreue nicht erforderlich ist.
Solange die Referenzierung eines Objektes zur Referenzlinie eindeutig ist, ist die Bestimmung der Länge und des Abstands ebenfalls eindeutig. Innerhalb einer Schleife (z.B. Serpentine), noch extremer eines Kreises gibt es mehrere bis unendlich viele gleichlange kürzeste Abstände des Objektes zur Referenzlinie. Da müssen Zusatzregeln die Eindeutigkeit der Zuordnung festlegen.
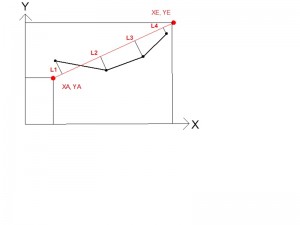
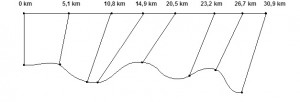
Mathematisch läßt sich der kürzeste Abstand eines Objektes zur Bezugslinie durch die Near-Funktion ermitteln. Das Längenmaß auf der Referenzlinie wird durch laufende Summierung der Streckenlängen aller Vertices berechnet und als eigene skalare Dimension von Vertex zu Vertex, genannt „measure“ (z.B. in Metern oder auch nur in Prozent der Gesamtlänge) der Polyline hinzugefügt (in FME durch den „MeasureGenerator“) . Die Entfernung des Projektionspunktes eines neben der Referenzlinie liegenden Objektes wird dann durch Inter- bzw. Extrapolation auf der Skala des „measure“ ermittelt (in FME „MeasureExtractor“ und „NeighborFinder“ bzw. „MeasureInterpolator“). Für die Lineare Referenzierung in ArcGIS von ESRI gilt ähnliches: http://desktop.arcgis.com/de/arcmap/10.3/guide-books/linear-referencing/what-is-linear-referencing.htm
- Variable Zuordnung mehrerer zusammenhängender Mittellinien zu einer Referenzlinie und einer gemeinsamen „routeid“
- Anpassung der Linearen Referenzierung eines Objekts an die variable Zuordnung
- Ermittlung der Linearen Referenzierung und Georeferenzierung nach Positionsänderung eines Objektes unter der Annahme, die Positionsänderung wird von außen, etwa einem Referenzpunkt aus registriert, alternativ vom Objekt aus.
Meßwertauswertung
- Ermittlung der Verkehrsdichte vorgegebener Objekttypen (z. Kfz-Klassen) zufallsbezogener Ereigniswahrscheinlichkeiten an einem Referenzunkt (z.B. Autobahnquerschnitt)
- Das gleiche mit Unterteilung nach Fahrspuren
- Das gleiche für mehrere Referenzpunkte (Kreuzung)
Situationsbeschreibung von festen und beweglichen Referenzpunkten
- Aggregation der Meßwerte situativ zusammengehörender Referenzpunkte nach Zeitintervallen (z.B. lfd. Minutendurchschnitt)
- Übermittlung dieser Werte an andere feste Referenzpunkte (I2I-Communication)
- Übermittlung dieser Werte von festen Referenzpunkten an bewegliche Objekte (V2I-Communication) und umgekehrt
- Übermittlung dieser Werte von und zu beweglichen Objekte (V2V-Communication); z.B. in einer Richtung: Flotten, Zugfolge; in Gegenrichtung
Verkehrsprojektion
- Berechnung von zeitabhängigen Parametern und künftiger Verkehrsdichten aus Zeitreihenanalyse
- Ermittlung von zeitabhängigen großräumigen Verkehrsaufkommen und Situationen
Situationsdarstellung
- Überführung der Ergebnisse in geeignete Präsentationsmedien in passenden Datenformaten